


[概要精読] “Emotional Architecture for the Humanoid Robot Head ROMAN” by J. Hirth+, 2007
アブストラクトの精読によって,本文をできるだけ楽に読めるように準備をする.今回読む文献はこれ.
文献情報
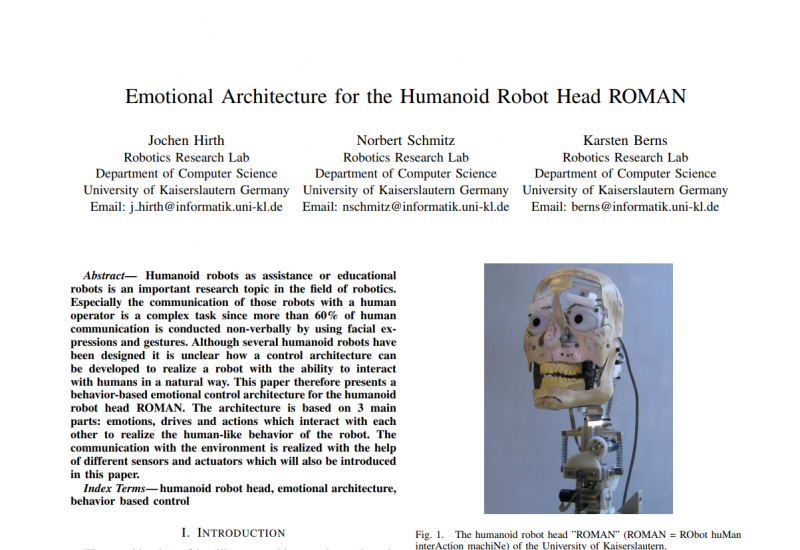
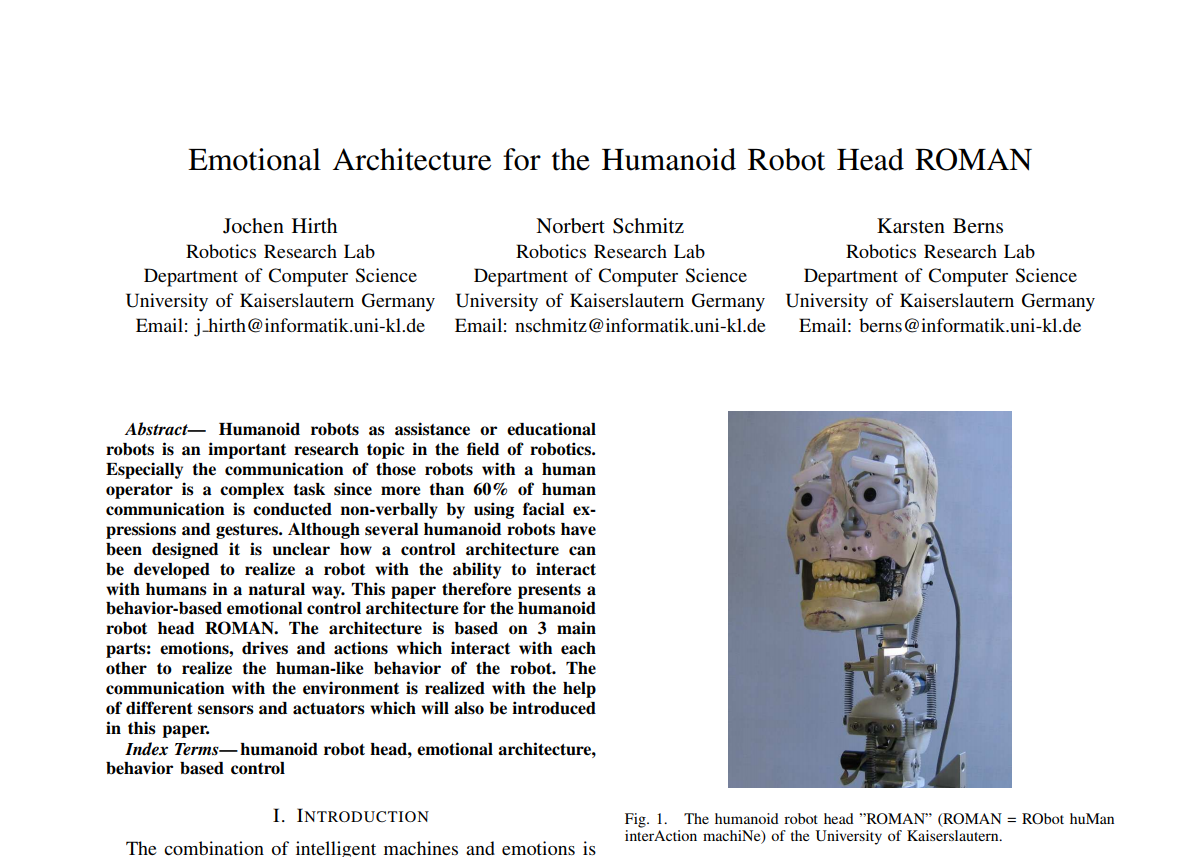
ドイツのUniversity of Kaiserslauternのチームの国際会議論文.タイトルから,ROMANという人型ロボットの頭に使うためのEmotional Architectureを作ったことの報告であることが分かる.キーワードは,humanoid robot head, emotional architecture, behavior based controlなので,タイトル通り,emotional architectureをhumanoid robot headにいれてbehovior based controlを行った研究という理解で問題なさそうだ.
Abstract
まずはアブストをしっかりと読んで,課題-根元の問題-解決アイデア-結果-結論の対応を可能な限り把握し,本文での要確認事項を整理する.要確認事項がなければ,当面はアブスト読みだけで終える.
まずは1,2行目.
Humanoid robots as assistance or educational robots is an important research topic in the field of robotics. Especially the communication of those robots with a human operator is a complex task since more than 60% of human communication is conducted non-verbally by using facial expressions and gestures.
1行目は単にコミュニケーション能力が重要なロボットを対象にした研究だよ,という対象限定の宣言.2行目が課題の説明だと思われる.人がロボットを遠隔操作して別の人とコミュニケーションをとろうとするときに,表情やジェスチャを操作するのが大変すぎるからなんとか簡単にしたい,というのが課題であるらしい.課題把握はとりあえずOK.
それに続く3行目では,
Although several humanoid robots have been designed it is unclear how a control architecture can be developed to realize a robot with the ability to interact with humans in a natural way.
とあるので,これが根元の問題か.課題がこれまで解決できなかったのは,自然に人とやり取りするための制御の仕組みを誰もはっきりさせないままロボットを作ってきたからだ,と言いたいようだ.課題と根元の問題のマッチングは乱暴だが,ひとまず対応OKとして先を読む.
4,5行目には,
This paper therefore presents a behavior-based emotional control architecture for the humanoid robot head ROMAN. The architecture is based on 3 main parts: emotions, drives and actions which interact with each other to realize the human-like behavior of the robot.
とあるので,これが解決のアイデアらしい.Therefore,と書いてあるので間違いなさそう.ROMANという人型ロボットの頭を使うべき理由は書かれていないので,おそらくこれは単なる題材で,大事な解決の肝は”behavior-based emotional control architecture”なるものにあるようだ.このarchitectureは,emotions, drives, actionsという三つの部分からできていて,それらが相互作用することでロボットの振舞が人らしくなるらしい.人らしく振舞わせるための仕組みがないというのを根元の問題として挙げていたので,問題とアイデアのマッチングはOK.ただし,それぞれの部分がどのような機能を持っていて,それらがどのように相互作用してロボットの振舞を決定するのかの詳細は書かれていないので,これを本文での要確認事項①とする.また,もしかするとROMANの仕様との関連でこのarchitectureの性能が変わるかもしれないので,ROMANの仕様とarchitectureの関りも要確認事項②とする.ここまでは概ね混乱なく読めた.
続く6, 7行目ではこのアイデアが根元の問題の解決にどれだけ貢献したのかの結論とそれを支える定量的な結果が述べられていて欲しい.しかし,読んでみると,
The communication with the environment is realized with the help of different sensors and actuators which will also be introduced in this paper.
とのことで,大混乱に陥った.結論のような形式で書いてあるものの,それまでの話との対応がとれない.まず,各種センサとアクチュエータの助けでenvironmentとのコミュニケーションが実現できた,と言っているが,そのenvironmentとは何なのか?人は必ず含んでいると思うが,なぜあえてenvironmentと表現しているのか?また,コミュニケーションの実現を助けるのは3モジュールの相互作用だと言っていたのに,それがなぜセンサとアクチュエータの助けという表現に変わっているのか?さらに,コミュニケーションが実現されたというのは,自然な振る舞いができたというのと同義なのか?同義だとしても,それはどうやって評価したのか?この混乱を解消するためには,やはり本文を読んでいかないとだめだろう.センサとアクチュエータが3要素の相互作用の中でどのような役割を果たすのかを要確認事項③とする.ロボットを動かしたenvironmentの詳細を要確認事項④とする.そして,自然な振る舞いorコミュニケーションの実現,をどのように評価したのかを要確認事項➄とする.
まとめ
以上でアブストラクトの精読は終わり.要確認事項は以下の5つとなった.
- “behavior-based emotional control architecture”の3要素の役割分担と相互作用の詳細
- ROMANの仕様とControl architectureの機能的関連
- センサとアクチュエータがControl architectureの動作に与える影響
- ロボットを動かしたEnvironmentの詳細
- ロボットの振舞の評価方法
この事項を確認するための本文読解は別記事で行う.

