Research 2016.01.15Research, 研究テーマ861 views 柔らかい身体の動かし方を学ぶ [:ja] 人のように運動経験を通じて身体の操り方を学ぶ機械学習法によって,空気圧駆動の柔軟ロボットの姿勢制御を実現する取り組みを行っています. 2016.01.15Research, 研究テーマ 861 views
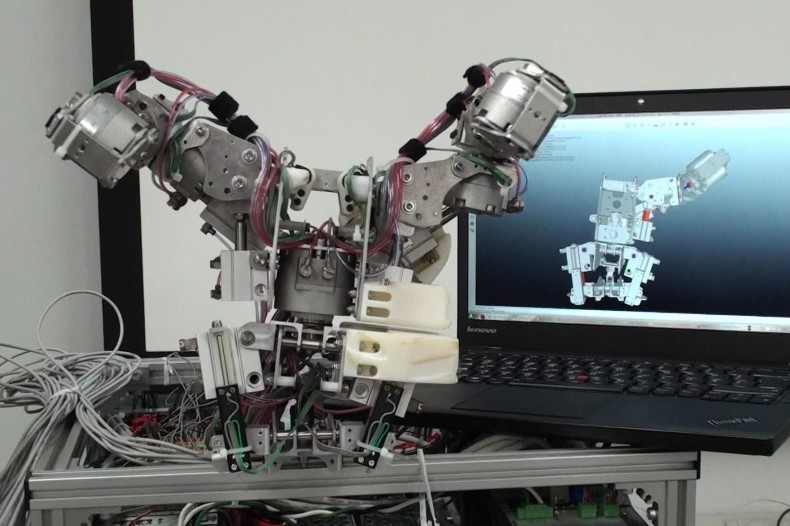
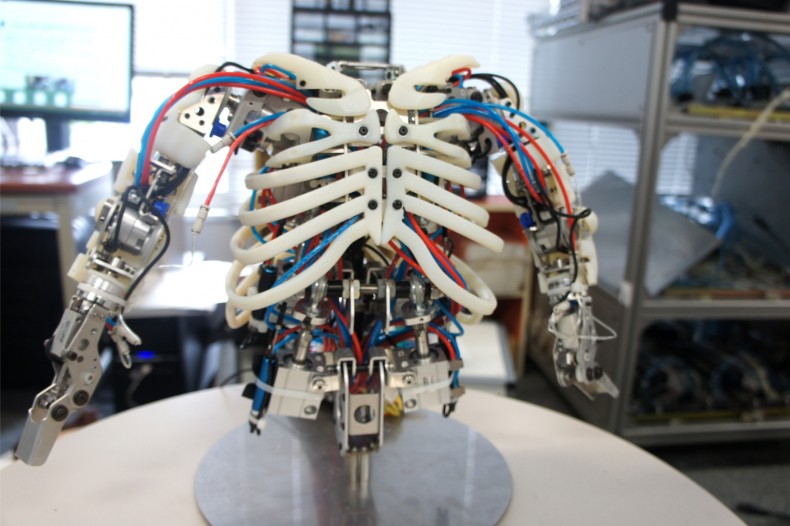
Research 2016.01.15Research, 研究テーマ3,112 views 小型アンドロイドの骨格機構開発 人が躊躇なく触れることができるよう,空気圧で駆動される柔らかい関節を備えた小型の柔軟人型骨格機構の設計開発を行っています.2021年現在,3号機まで公... 2016.01.15Research, 研究テーマ 3,112 views