


小型アンドロイドの骨格機構開発
人が躊躇なく触れることができるよう,空気圧で駆動される柔らかい関節を備えた小型の柔軟人型骨格機構の設計開発を行っています.2021年現在,3号機まで公表しており,研究では4号機が稼働中です.
骨格機構 1号機 (2011年開発)
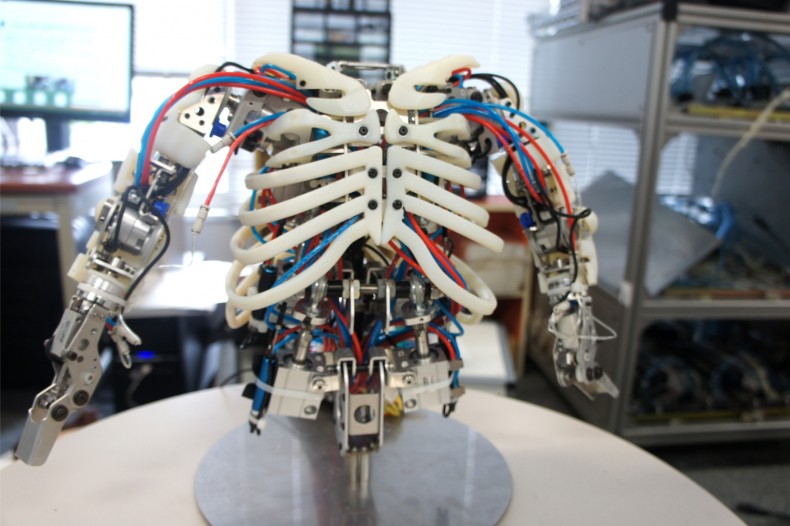
人型の関節機構を設計する際の問題の一つは,スペース形状と関節配置の制約です.細い円筒形の腕部には直列に関節が並び,薄い直方体型の胸部の左右の端には複雑な動きを実現する関節が配置され,そして楕円筒形の胴体部には前後左右に動く関節が直列に並んでいます.このような制約を守った上で体を支えて動かす力と広い可動範囲を実現するには,許される人型のスペースの中に,姿勢が変わった場合でも互いにぶつからないように多くの機械部品を配置することが必要です.
骨格機構の1号機は,柔らかく力強い動きを実現する空気圧アクチュエータ(エアシリンダ及びエアベーンアクチュエータ)を,高さ22cm,肩幅18cm程の小さな上半身のスペースにどのように配置するのがよいかを検討するために開発しました.複雑に動く関節には直方体型のエアシリンダが折り重なるような配置を採用することで,首に3,両腕に8,胸部に7,腹部に4つのアクチュエータを配置した場合でもある程度実用的な可動範囲を実現できることを確認しました.
関連文献
- Hisashi Ishihara, Yuichiro Yoshikawa, and Minoru Asada. Realistic Child Robot “Affetto” for Understanding the Caregiver-Child Attachment Relationship that Guides the Child development. In Proceedings of the First Joint IEEE Int’l Conf. Development and Learning and on Epigenetic Robotics, Vol. 2, pp. 1-5. Aug. 2011.
- Minoru Asada, Yukie Nagai, and Hisashi Ishihara. Why Not Artificial Sympathy? Social Robotics in Lecture Notes in Computer Science, Vol. 7621. pp. 278-287, October 2012.
- 石原尚, 浅田稔. 子供酷似型ロボットAffettoの小型で柔軟な上半身機構. 第29回日本ロボット学会学術講演会予稿集, p. 1A3-8, 2011年9月7日.
- Hisashi Ishihara and Minoru Asada. Affetto: pneumatic child robot that has realistic appearance. 大阪大学グローバルCOE「認知脳理解に基づく未来工学創成」 Bielefeld-Osaka Workshop, ポスターセッション. 2012年3月19日.
- 石原尚, 浅田稔. 20ヶ月児サイズの子供酷似型ロボット「Affetto」の柔らかく駆動する上半身の開発. 日本赤ちゃん学会第12回学術集会, ポスターセッション, 2012年6月2日.
- 石原尚. 人とAffettoの密接でリアルな接触コミュニケーションのための上半身の設計. 身体性認知科学と実世界応用に関する若手研究専門委員会(ECSRA) 第10回ワークショップ,vol. CD-ROM, 2012年8月7日.
骨格機構 2号機 (2013年開発)
機構ver.1の問題であった腕部の出力不足と,脆弱な関節角度センサ部の露出を解決しつつ,構造部材の軽量化と形状のスリム化を図ったものです.動作速度が向上し,将来の皮膚実装のための外装の実装が可能になりました.腹部には二連結パラレルリンクを,肩には二連結スライダクランク機構を採用しています.
関連文献
- Hisashi Ishihara and Minoru Asada. Design of a 22 DOF pneumatically-actuated upper body for a little child android ‘Affetto’, Advanced Robotics. vol. 29, issue 18, 2015.
- Hisashi Ishihara and Minoru Asada. “Affetto”: towards a design of robots who can physically interact with people, which biases the perception of affinity (beyond “uncanny”). IEEE Int’l Conf. on Robotics and Automation, Workshop, May 2013.
骨格機構 3号機 (2015年開発)
上半身姿勢の安定化のために腹部の出力を向上させ,また耐久性と動作信頼性の向上のために機械部品の締結方法を全体的に改善しました.また,下腹部の関節を部分的に廃止し,新たに開発した脚部の骨格機構と連結させられるようにしました.この脚部機構についても,関節毎に割り当てられるスペースの形状と関節の配置に合わせてアクチュエータの形状の選定やリンク機構が設計されており,高さ35cm程の小型でありつつも,ある程度の正座や割座も可能なほどに可動範囲の広い10の関節を備えています.
紹介記事
関連文献
- Hisashi Ishihara. Compliant and compact joint mechanism for a child android robot. The 11th ACM/IEEE International Conference on Human-Robot Interaction, New Zealand, March 7-10 2016.
- 豊山翔平, 石原尚, 浅田稔. エアシリンダを用いた幼児型ロボットの脚部開発. ロボット・メカトロニクス講演会2014. p. 3A1-C05. 富山, 2014年5月28日.
- Hisashi Ishihara. Design and Development of a Child Android with high flexibility, durability, and expressiveness. International Symposium at Frontier Research Base for Global Young Researchers. 大阪大学銀杏会館. 2014年11月5日.
- 豊山翔平. エアシリンダを用いた幼児型ロボットの脚部開発. 大阪大学工学部卒業論文. 2013.
- 横尾亮輔. 広い可動域を有する空気圧駆動の小型5自由度肩機構の開発. 大阪大学工学部卒業論文. 2015.
- 豊山翔平. スライダクランク機構を用いた空気圧駆動による小型脚部機構の可動域向上. 2015.

