


柔らかい身体の動かし方を学ぶ
[:ja]
人のように運動経験を通じて身体の操り方を学ぶ機械学習法によって,空気圧駆動の柔軟ロボットの姿勢制御を実現する取り組みを行っています.
平衡状態モデル学習
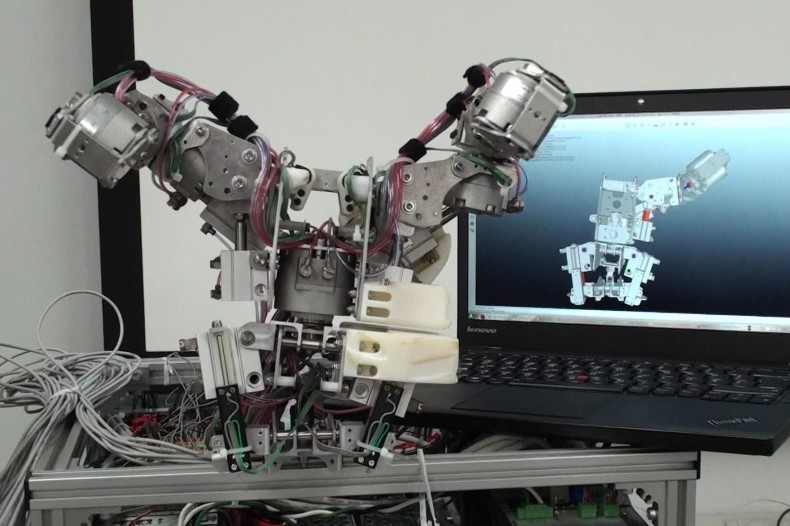
柔軟な関節を備えるロボットは人との触れ合いには適しているものの、姿勢安定化が難しくなります。特性が変化しやすい柔軟要素が身体に含まれる場合には時空間的に複雑な挙動となるため、身体の事前モデル化による従来の制御手法が効果的でないためです。そこで、開発した空気圧駆動の上半身ロボットを用いて、独ビーレフェルト大学の研究グループが提案している「平衡状態モデルの学習法」と「運動指令空間と姿勢空間の写像の高速学習法」による姿勢制御研究の実施が決定し、同大博士課程の学生が現在滞在して実験中です。
[:en]
The flexible robot introduced as above is suitable for physical contact with humans while it is difficult to stabilize its posture. Because of its complex time-space dynamics, traditional model-based control methods are not effective for the robots with large number of flexible joints. Therefore, motor learning methods, in which robots learn the way to control their body through motor experience like humans, is the main methodology to stabilize the developed robot in my project.
Equilibrium model learning
A joint research with a group at Bielefeld University in Germany has been started to test their motor learning methods (Equilibrium model learning and Rapid mapping learning between motor space and posture space) on my robot. One Ph.D. candidate student from the university is staying our laboratory and testing the above method. Although the progress is delayed about a half year due to the schedule change of his stay, the initial progress is going well.
[:]

