


弾性柔軟素材の触覚センサ化
アンドロイドの骨格機構の表面は肉厚柔軟素材で覆われます.その素材の材質や構造は,身体部位ごとに異なる機能要求に応じて様々です.このように異なる肉厚柔軟素材の特性をなるべく損なうことなく,感度が良く,また耐久性やメンテナンス性も高い方式で触覚センサ機能を付与する技術を研究しています.このように「感触を損なわずに弾性柔軟素材を触覚センサにする技術」は,アンドロイドの皮膚への利用だけでなく,私たちの生活環境に溢れる柔軟素材にも応用可能です.この研究は,阪大基礎工学研究科の川節拓実先生と堀井隆斗先生との共同研究です.
磁石+磁束センサ+強磁性粒子による方式(2015~2018)
柔軟素材の表面付近に強磁性微粒子(純鉄粉)を含有させ,それを磁石と磁束センサ(GMR)を搭載した基盤の上に載せた構造の触覚センサを提案しました.強磁性微粒子の空間配置の変化により生じる磁場の変化を磁気センサで計測することで,素材表面への接触(押し込み量)を推定するという方式です.柔軟素材内に,微粒子以外の異物(電気配線や電子素子など)を加えないため,素材の柔らかさが保たれます.
- 関連文献・特許
- 特許出願 2016-146070, 川節拓実, 堀井隆斗, 石原尚, 仲田好宏, 浅田稔, 細田耕, 宮下敬宏, 変形測定装置, 株式会社国際電気通信基礎技術研究所, 出願日 2016年7月26日
- 川節 拓実, 堀井 隆斗, 石原 尚, 浅田 稔. 磁性・非磁性エラストマを積層した磁気式触覚センサの基礎特性解析. 第24回MAGDAコンファレンス, 1-5-3. 仙台. 2015.11.13. 優秀ポスター講演論文賞受賞
- 川節 拓実, 堀井 隆斗, 石原 尚, 浅田 稔. 磁性エラストマを用いた磁気式触覚センサの特性評価. 第16回計測自動制御学会システムインテグレーション部門講演会. 2L3-5. 名古屋. 2015.12.15.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Toward humanlike tactile sensation: magnetic type tactile sensor with dual-layer elastomer. The 2nd International Workshop on Cognitive Neuroscience Robotics. 大阪. 2016年2月21日.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. A magnetic type tactile sensor that detects deformation of its surface made of dual layer elastomer. CITEC Workshop “From Robotics to Cognitive Interaction and Beyond”. Bielefeld University (Germany). Mar. 22, 2016.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, Minoru Asada. Towards rich physical human-robot interaction: A novel magnetic-type flexible tactile sensor that detects its surface deformation. ICRA 2016 WS “human-robot interfaces for enhanced physical interactions”. May 16, 2016.
- 川節 拓実, 堀井 隆斗, 石原 尚, 浅田 稔. 磁性・非磁性エラストマを用いた磁気式触覚センサの磁場解析.The Robotics and Mechatronics Conference 2016. 横浜.2016.6.9.
- 川節拓実, 堀井隆斗, 石原尚, 浅田稔. Difference of Gaussian 様空間応答を示す磁気式柔軟触覚センサ. 第34回日本ロボット学会学術講演会講演論文集. 山形大学, Sep. 7, 2016.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Difference of Gaussian like feature enhances object classification accuracy in magnetorheological elastomer-gel tactile sensor. Humanoids Workshop on Tactile sensing for manipulation: new progress and challenges. Bielefeld University (Germany), Nov 15, 2016.
- 川節 拓実, 堀井 隆斗, 石原 尚, 浅田 稔. 磁性・非磁性エラストマを積層した磁気式触覚センサの基礎特性解析. 日本 AEM 学会誌. Vol.24, No.3, pp.204-209, Dec. 21, 2016.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Magnetorheological Elastomer-Gel Tactile Sensor: Protectability and Sensitivity.
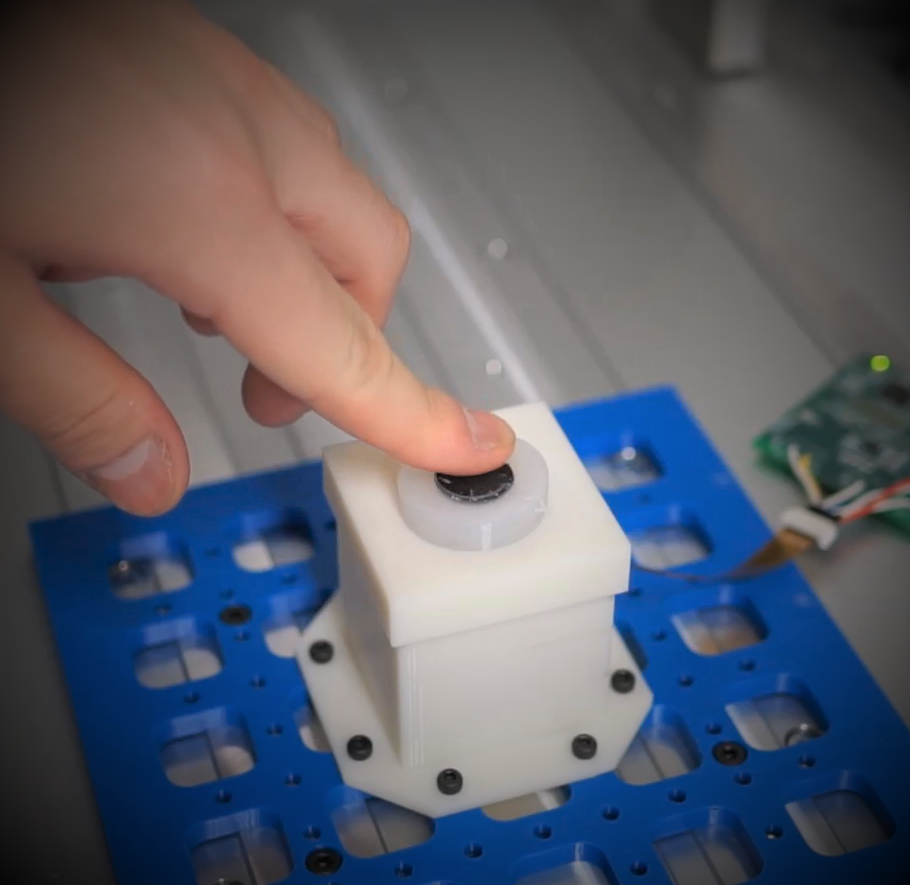
コイルと強磁性粒子による方式(2017~)
2015年より開発を進めていた磁石と磁気センサを用いる方式では,力や衝撃が加わる部分の至近距離に繊細な磁気センサが基盤実装せざるを得ないという問題がありました.そこで,磁石と磁気センサの組み合わせの代わりに,コイルとコンデンサからなるLC回路を用いる方式を提案しました. 強磁性微粒子の空間配置の変化により生じるLC回路の共振周波数の変化を計測するというものです.基盤に複数コイルを実装し,強磁性微粒子を局所配置させることで,押し込みだけでなく,横ずれも測定可能な3軸力覚センサにすることができました.この技術は応用の幅が広いため,現在社会実装のための取り組みを進めています(石原がビジョンとコンセプトの取りまとめを担当し,阪大基礎工学研究科の川節拓実先生が技術実装を,阪大基礎工学研究科の堀井隆斗先生が情報処理の部分を主に担当して進めています).
- 関連文献
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Flexible Tri-axis tactile sensor using a spiral inductor and magnetorheological elastomer. IEEE Sensors, Vol. 18(14), pp. 5834-5841, 2018. (submitted on Feb. 22 2018. Accepted on May 14 2018)
- 石原尚.柔軟素材への3軸力覚センサ付与と自動車分野への応用.Material Stage.20(11).2021.
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Size dependency in spatial response property of elastomeric tactile sensor laminated on inductor coil. IEEE Sensors Conference. Glasgow (UK), Poster. Oct. 30, 2017.
- 川節拓実,堀井隆斗,石原尚,浅田稔.磁性エラストマを用いた柔軟な3軸力覚センサ,日本ロボット学会学術講演会.1F1-01.Sep. 12, 2017.
- 川節拓実,堀井隆斗,石原尚,浅田稔. 磁性エラストマと平面コイルを用いたインダクタンス測定に基づく柔軟触覚センサの開発. 第26回MAGDAコンファレンス, A5-02. 金沢. Oct. 27, 2017.
- 川節拓実,堀井隆斗,石原尚,浅田稔.磁性エラストマとスパイラルコイルを用いた柔軟触覚センサのアレイ化.ロボット・メカトロニクス講演会. p. 1A1-K15. 北九州. 2018.6.4.
- 久米 弘祐,川節拓実,石原尚,堀井隆斗,浅田稔.三角格子状に配置したコイルと磁性マーカを用いた柔軟触覚センサの基礎特性評価.ロボティクス・メカトロニクス 講演会,広島県広島市,2019.
- 石原尚.感触を損なわずに弾性柔軟素材を触覚センサにする技術.実装フェスタ関西.オンライン.2021.1.27.

