


アンドロイドの機械性能評価
アンドロイドロボットを高機能化しようと,様々な内部機構や皮膚の構成が検討されています.しかし,各種構成によって結局どのくらい良いアンドロイドができたのかを測るための統一的・客観的な評価指標がないため,多種のアンドロイドとの比較検討がなく,乱立気味です.アンドロイドの開発競争が効果的に行われるようにするためには,どのような構成のアンドロイドであっても適用可能でありながら,具体的な特性の良し悪しを定量的に把握できる評価指標が必要です.そこで,アンドロイドの機械性能評価を行うための方法を研究しています.
顔皮膚表面の操りやすさの定量評価(2018年)
アンドロイドの顔は主に,表面の柔軟被覆,被覆を支える外殻,外殻内部に収められた駆動機構の3層構造になっています.駆動機構が発揮する力が何らかの駆動力伝達方式によって外殻を経由して柔軟被覆を変形させるという仕組みです.1つのアンドロイドの顔でも,多種の表情を作り出すための多くの駆動機構が内蔵されています.
アンドロイドによって素材・形状・構造・方式は様々ですが,一般に,駆動機構の動きと被覆表面の動きの関係はかなり複雑です.たとえば,駆動機構を少し動かしただけでは被覆の表面はほとんど動きません.被覆は非常に柔らかいので,被覆の内面付近だけが変形して,力が被覆表面にまで伝わらないからです.また,被覆表面が動いたとしても,駆動機構の動きに対してどのように追従するかは,被覆の場所によって様々です.たとえば,外殻との摩擦が強い部分はなかなか追従して動きません.
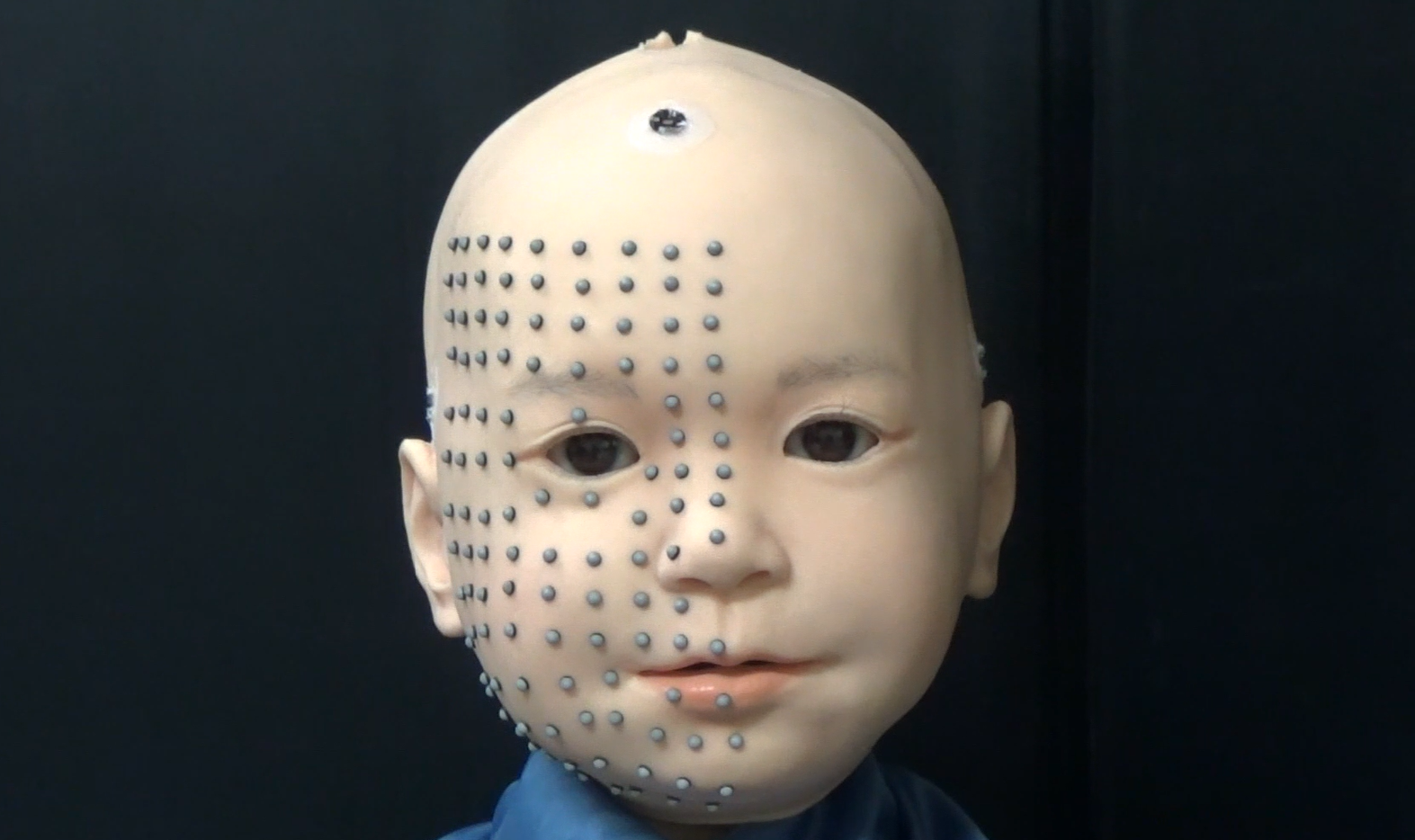
このように,アンドロイドの顔の被覆は非常に操りにくいにも関わらず,その「操りにくさ」を定量化する方法はありませんでした.定量化されていなければ,改善点も特定できず,また上手く操るための対策も打てません.そこで,特定のパターンで駆動機構を1つずつ動かした際に,アンドロイドの顔皮膚表面がどのように追従するかをモーションキャプチャ装置で精密計測し,各駆動機構ごとに,被覆の追従特性を分析しました.
結果として,「①敏感性:機構の小さな動きに対して皮膚がどれだけ敏感に動くか」「➁ヒステリシス性:機構の動きの向きによって皮膚の追従性がどれだけ変わるか」「③非同期性:皮膚の追従の仕方が皮膚の位置によってどれだけ異なるか」という3つの特性値で,各機構ごとに皮膚の操りにくさの違いをうまく説明できることがわかりました.
この特性値を駆動機構ごとに把握し,3次元にプロットすることで,「皮膚の操りやすさ」という観点でどの機構がどれだけ他より優れているかを簡単に確認することができます.これで,あるアンドロイドの顔を効果的に改善するために,優先して改善すべき機構とその特性を絞りこむことができます.また,他のアンドロイドであっても,同じ方法で特性値を得ることができるため,「こちらのアンドロイドの方が,全体的にあのアンドロイドより操りやすい」といったような議論が可能になります.
- 関連文献
- Hisashi Ishihara, Binyi Wu, Minoru Asada. Identification and evaluation of the face system of a child android robot Affetto for surface motion design. Frontiers in Robotics and AI, 2018. (Submitted on Apr. 24 2018. Accepted on Sep. 25, 2018. )

