


Research
成果動画ギャラリー
研究成果の関連動画を掲載しているYoutube Channel “Child-type Android Project”の動画...
[:ja]研究業績,資金と業績の年次推移,研究テーマ紹介[:]
研究成果の関連動画を掲載しているYoutube Channel “Child-type Android Project”の動画...
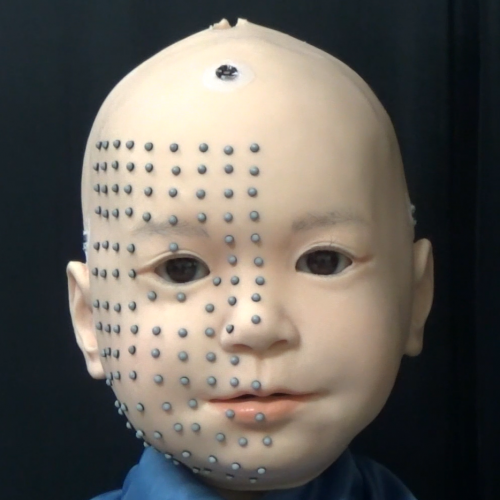
アンドロイドロボットを高機能化しようと,様々な内部機構や皮膚の構成が検討されています.しかし,各種構成によって結局どのくらい良いアンドロイドができたの...
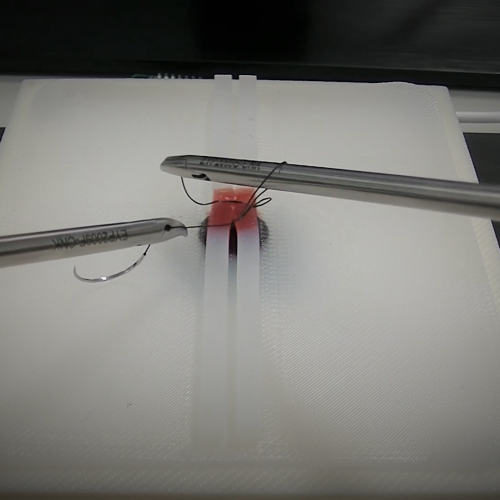
アンドロイドの皮膚用途として開発してきた肉厚柔軟な触覚センサの応用研究として,腹腔鏡手術の縫合結紮(縫って結び留める操作)と呼ばれる手技の定量的評価...

人もアンドロイドも,柔軟な皮膚素材を変形させることで様々な表情をつくりだします.このような変形方式によるアンドロイドの表情を洗練していくためには,「人...
①アンドロイド・ハードウェア開発 人の体のように表現力や感知力に優れ、また触れ合いやすい身体ハードウェアデバイスの設計・製造を実施しています。頭部から...

採録となった原著論文及び解説・意見論文のリストです. 原著論文 Hisashi Ishihara, Yuichiro Yoshikawa, Katsu...

査読付き及び査読なしの学会発表のリストです. 査読付き会議 Hisashi Ishihara, Yuichiro Yoshikawa, Katsush...

招待講演(研究成果紹介)のリストです. 招待講演 石原尚.養育者の自己鏡映と乳児の構音発達が可能にする母音共有. GCOE 認知脳理解に基づく未来工学...

特許リストとメディア記事のリストです. 特許 特許公開 2018-017536. 川節拓実, 堀井隆斗, 石原尚, 仲田好宏, 浅田稔, 細田耕, 宮...

これまでに研究指導に携わった学生さんの学位論文数の年次推移と,割り当てた研究テーマの一覧です. 担当した学生さんの学位論文の年次推移 下のグラフが年度...