


子供型アンドロイドロボットAffetto
研究テーマ
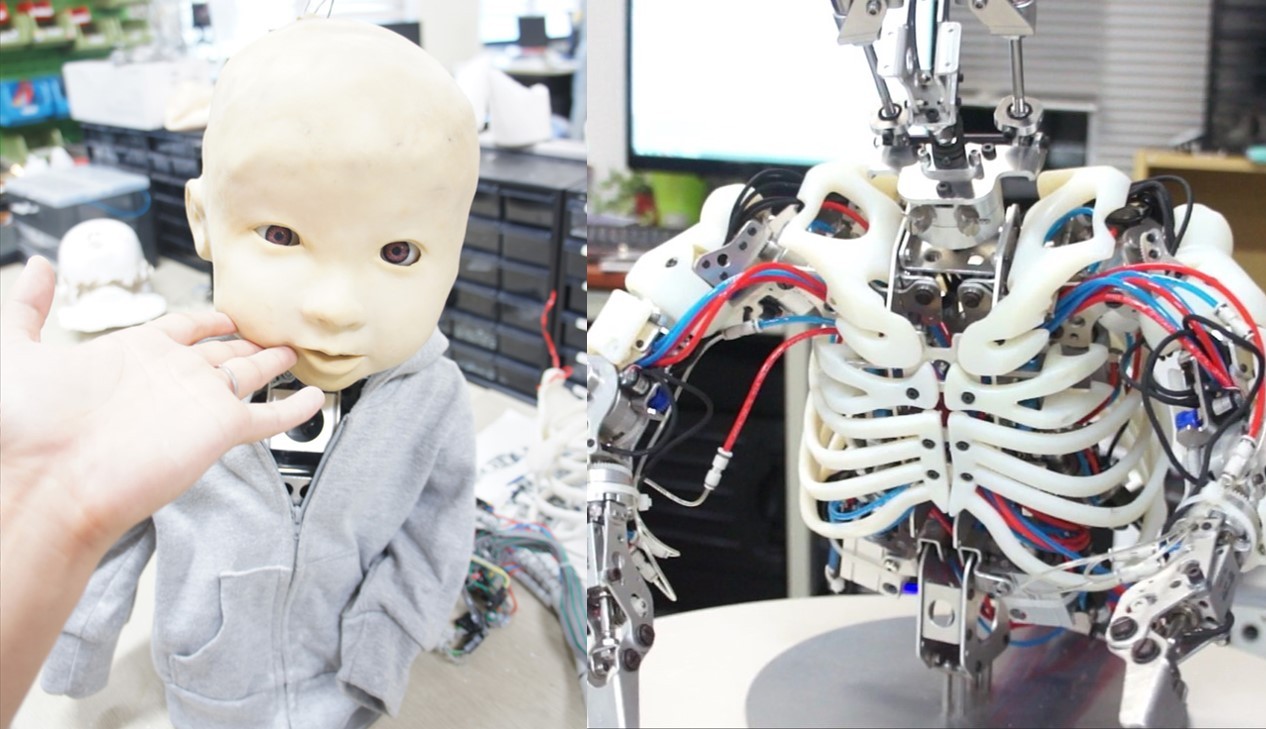
子供型アンドロイドAffetto(アフェット)は,まるで子供を相手にするかのような情緒豊かなロボットとの触れ合いの実現を目指して2011年から開発を続けている触れ合い性能特化型の小型で柔軟なアンドロイドです.2011年に初代の頭部と上半身機構を,2014年に脚部機構を,2015年に二代目の上半身機構を開発し,しなやかに動作する全身骨格機構としてプレスリリースを行いました.2015年からは肉厚で柔軟な皮膚触覚センサの開発も開始し,表現力だけでなく,感知力の向上も図っています.2018年に,二代目の頭部を開発し,プレスリリースを行いました.表現力と感知力を十分に高めた子ども型アンドロイドの実現は,これまで取得困難であった,触れ合いで交わされるデータを主観視点で能動的に収集する手段を得ることを意味します.このようなデータに基づいて触れ合いの理解が進めば、人とうまく触れ合うためのやり方を人工知能に学ばせる方法論が見出され、人との関係性をうまく調整して効果的に働きかけられるロボットの実現に繋がると期待しています.
[smartslider3 slider=2]
個別テーマの紹介記事

[:ja]柔軟皮膚の変形で人のような表情を呈示するアンドロイド型の顔ロボットの設計開発を行っています....
![[報道]新型の子供アンドロイドAffetto頭部の報道発表を行いました](http://www.ams.eng.osaka-u.ac.jp/user/ishihara/wp-content/uploads/2018/11/AffettoVer2-300x300.jpg)
2018年11月14日に,新しく開発した子供アンドロイドの頭部と,それを用いた表情変化の作り分けの成果について記者発表を行いました.これまで印象面での評価に留まっていたアンドロイドの機械的性能を定量的に評価し,その表情の変化を高い精度で作り分けることに成功した世界で初めての成果です.大阪大...
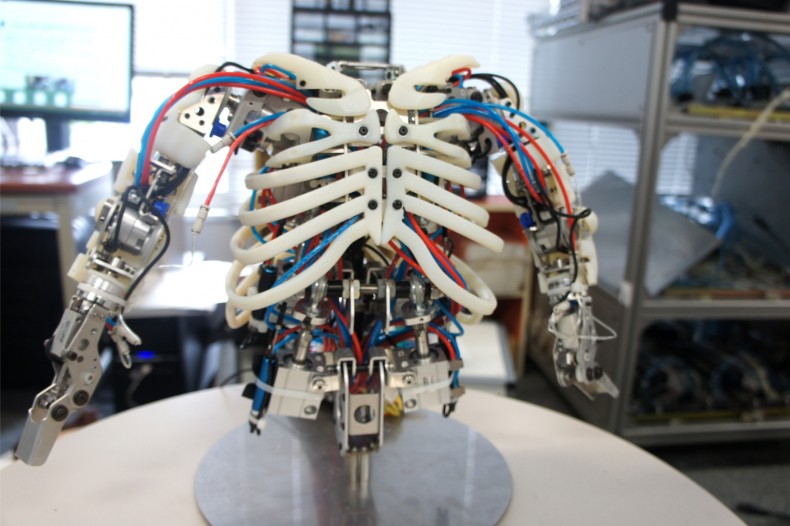
人が躊躇なく触れることができるよう,空気圧で駆動される柔らかい関節を備えた小型の柔軟人型骨格機構の設計開発を行っています.2021年現在,3号機まで公表しており,研究では4号機が稼働中です.
骨格機構 1号機 (2011年開発)
人型の関節機構を設計する際の問題の一つは,スペース形状と関節...
アンドロイドの骨格機構の表面は肉厚柔軟素材で覆われます.その素材の材質や構造は,身体部位ごとに異なる機能要求に応じて様々です.このように異なる肉厚柔軟素材の特性をなるべく損なうことなく,感度が良く,また耐久性やメンテナンス性も高い方式で触覚センサ機能を付与する技術を研究しています.このよう...
主要論文
- 小型多自由度柔軟骨格機構の設計開発(上半身機構を紹介した論文,脚部機構を紹介した論文,顔機構を紹介した論文)
- 柔軟肉厚かつ高感度の触覚センサの設計開発(GMR素子方式を提案した論文,インダクタンス計測方式を提案した論文)
参考になる外部記事
- “You’ve Come a Long Way, Disembodied Robot Baby” in Gizmode. 初代の顔からの発展を紹介してくれています.

