


研究テーマ
アンドロイドの機械性能評価
アンドロイドロボットを高機能化しようと,様々な内部機構や皮膚の構成が検討されています.しかし,各種構成によって結局どのくらい良いアンドロイドができたの...
[:ja]実施している研究テーマを紹介します[:]
アンドロイドロボットを高機能化しようと,様々な内部機構や皮膚の構成が検討されています.しかし,各種構成によって結局どのくらい良いアンドロイドができたの...
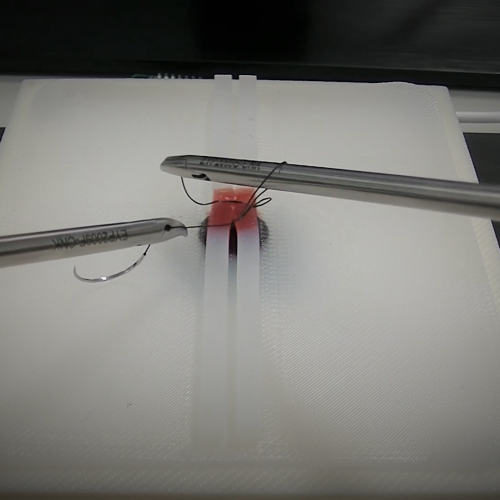
アンドロイドの皮膚用途として開発してきた肉厚柔軟な触覚センサの応用研究として,腹腔鏡手術の縫合結紮(縫って結び留める操作)と呼ばれる手技の定量的評価...

人もアンドロイドも,柔軟な皮膚素材を変形させることで様々な表情をつくりだします.このような変形方式によるアンドロイドの表情を洗練していくためには,「人...
①アンドロイド・ハードウェア開発 人の体のように表現力や感知力に優れ、また触れ合いやすい身体ハードウェアデバイスの設計・製造を実施しています。頭部から...
アンドロイドロボットの機械工学を基軸とする超域研究領域として提唱するシステムズ・アンドロイドロボティクスについて解説します. 概要 システムズ・アンド...
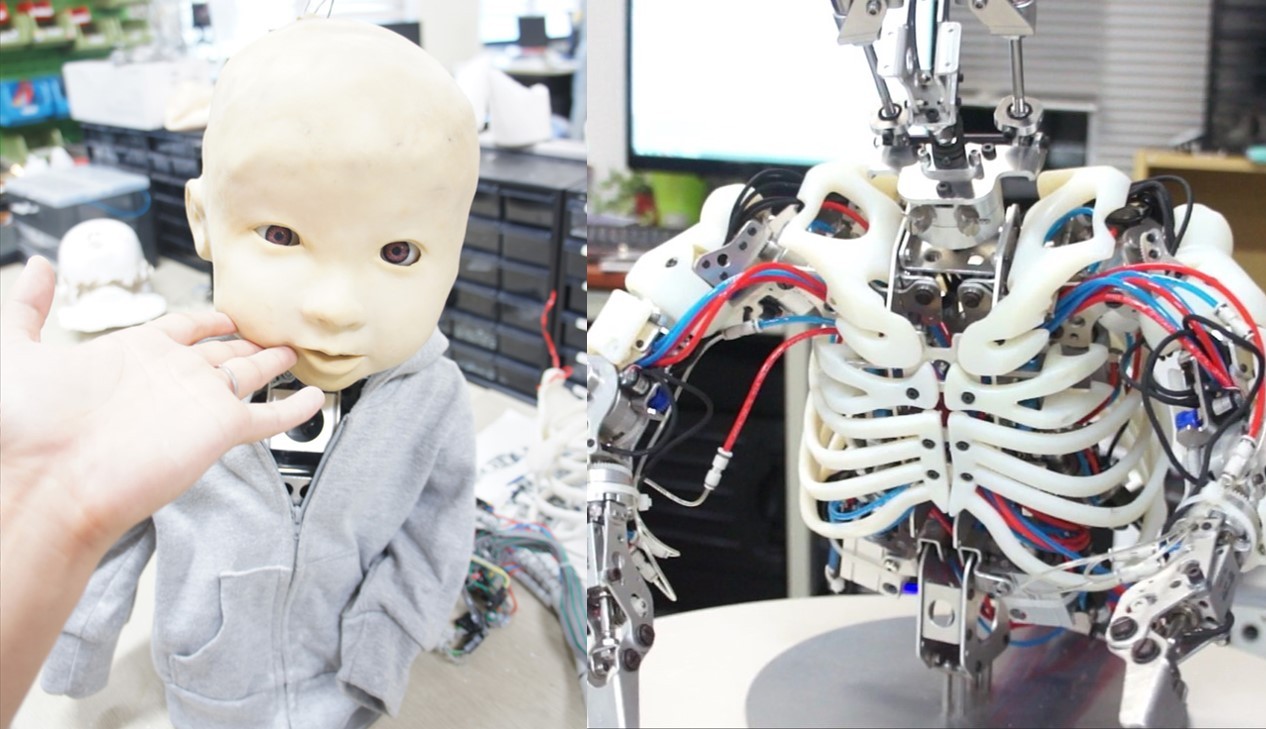
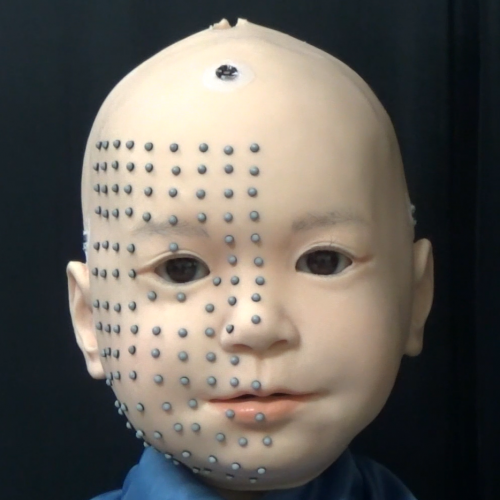
子供型アンドロイドAffetto(アフェット)は,まるで子供を相手にするかのような情緒豊かなロボットとの触れ合いの実現を目指して2011年から開発を続...
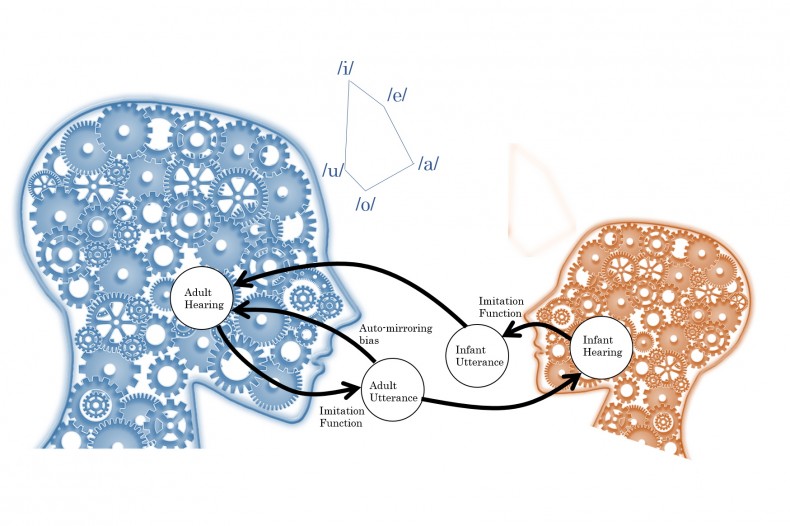
[:ja] 子供が母国語の母音を獲得する過程に,親の期待や模倣の癖(バイアス)がどのように影響するかを計算機シミュレーションで分析しています.

子供アンドロイドに対して向けられる発話を記録して音響的に解析し,大人が子供に向けるような特徴的な発話がどのように表れるかを調べる研究を行っています.理...

[:ja] 柔軟皮膚の変形で人のような表情を呈示するアンドロイド型の顔ロボットの設計開発を行っています.

コミュニケーションロボットの性格印象は,主に見た目や声によってデザインされてきました.しかし,人がロボットに触れることも想定する場合,触れたときの「触...