


Research
システムズ・アンドロイドロボティクス
アンドロイドロボットの機械工学を基軸とする超域研究領域として提唱するシステムズ・アンドロイドロボティクスについて解説します. 概要 システムズ・アンド...
[:ja]研究業績,資金と業績の年次推移,研究テーマ紹介[:]
アンドロイドロボットの機械工学を基軸とする超域研究領域として提唱するシステムズ・アンドロイドロボティクスについて解説します. 概要 システムズ・アンド...
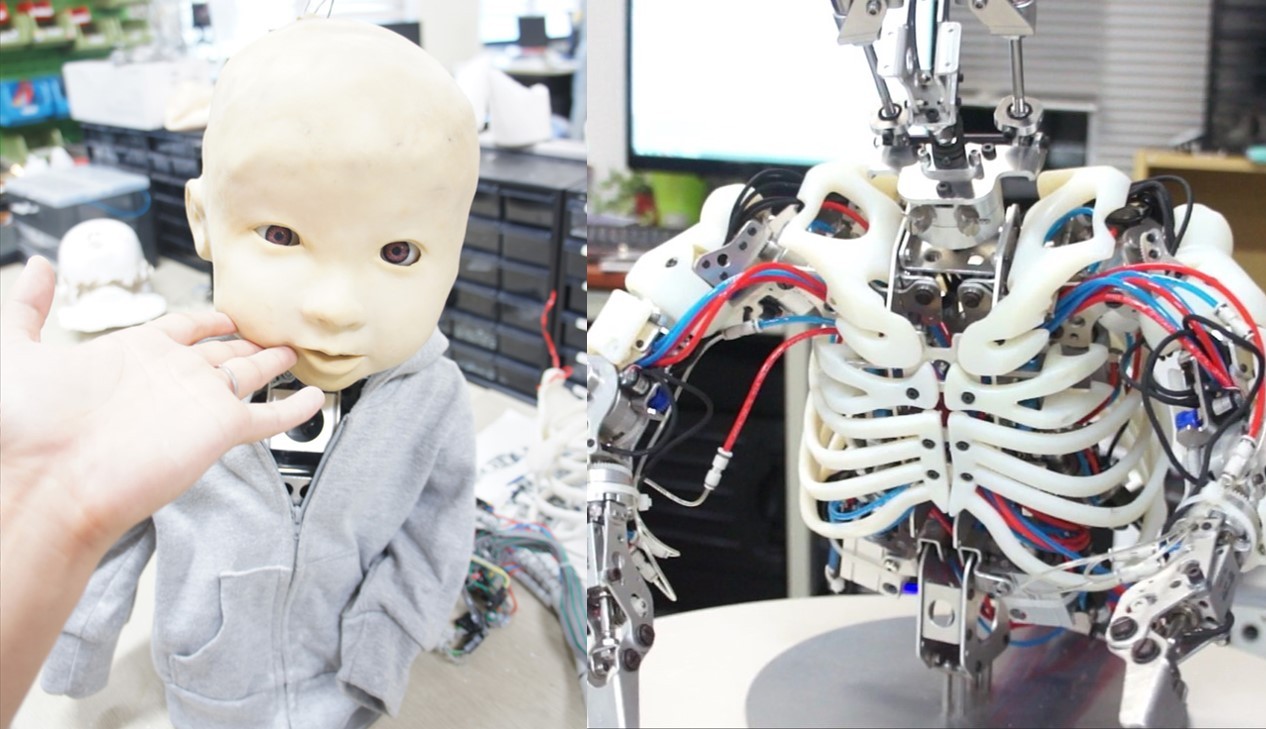
子供型アンドロイドAffetto(アフェット)は,まるで子供を相手にするかのような情緒豊かなロボットとの触れ合いの実現を目指して2011年から開発を続...

研究業績の年次推移です. 研究業績 原著論文(査読中),原著論文,学会論文(査読無),学会論文(査読有),受賞,解説・コメント論文,招待講演についての...

研究資金の年次推移を紹介しています. 研究資金 下のグラフは,これまでに獲得した競争的資金の年度推移を示しています.PIは研究代表者として,Co-Iは...
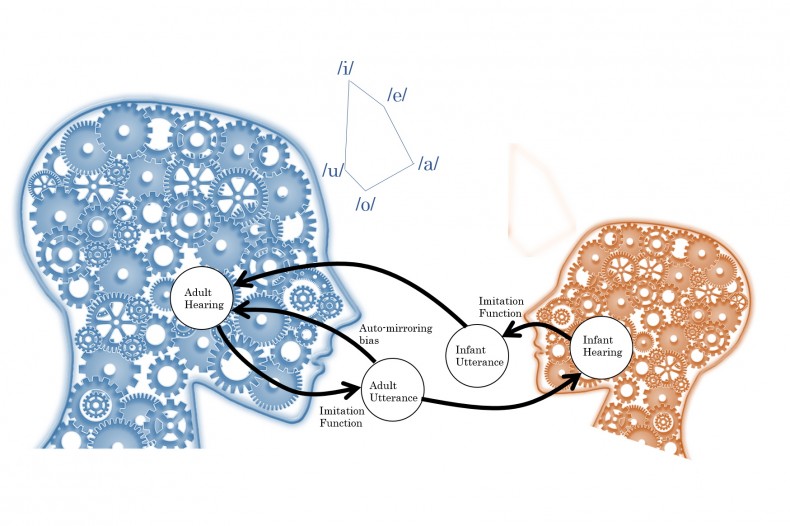
[:ja] 子供が母国語の母音を獲得する過程に,親の期待や模倣の癖(バイアス)がどのように影響するかを計算機シミュレーションで分析しています.

子供アンドロイドに対して向けられる発話を記録して音響的に解析し,大人が子供に向けるような特徴的な発話がどのように表れるかを調べる研究を行っています.理...

[:ja] 柔軟皮膚の変形で人のような表情を呈示するアンドロイド型の顔ロボットの設計開発を行っています.

コミュニケーションロボットの性格印象は,主に見た目や声によってデザインされてきました.しかし,人がロボットに触れることも想定する場合,触れたときの「触...
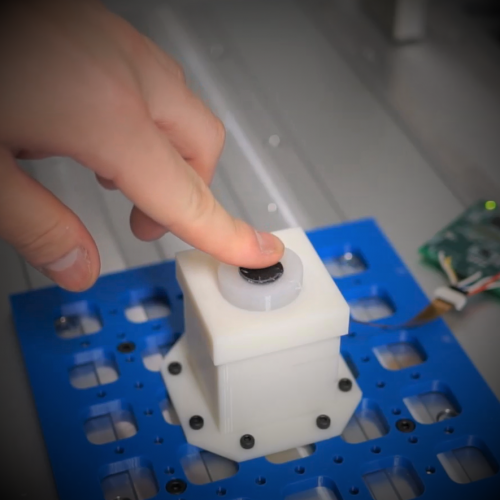
アンドロイドの骨格機構の表面は肉厚柔軟素材で覆われます.その素材の材質や構造は,身体部位ごとに異なる機能要求に応じて様々です.このように異なる肉厚柔軟...

[:ja] 人の表情表出に伴う皮膚の流れベクトルを多くの点において計測して特徴を分析し,アンドロイド型の顔ロボットの設計に役立つ情報を得ることを試みて...